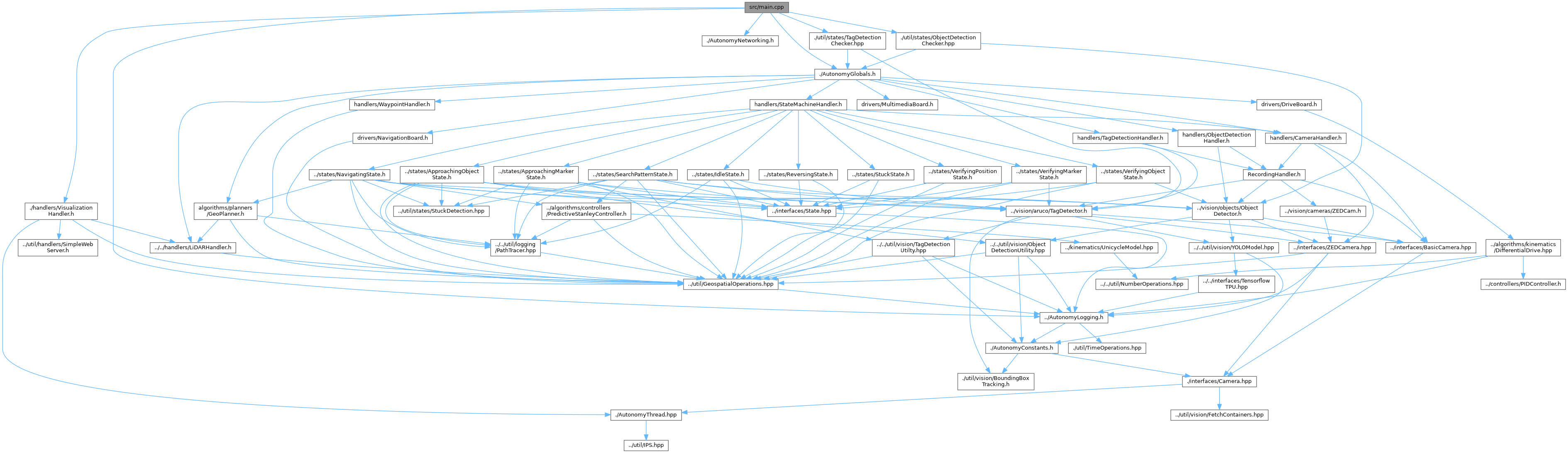
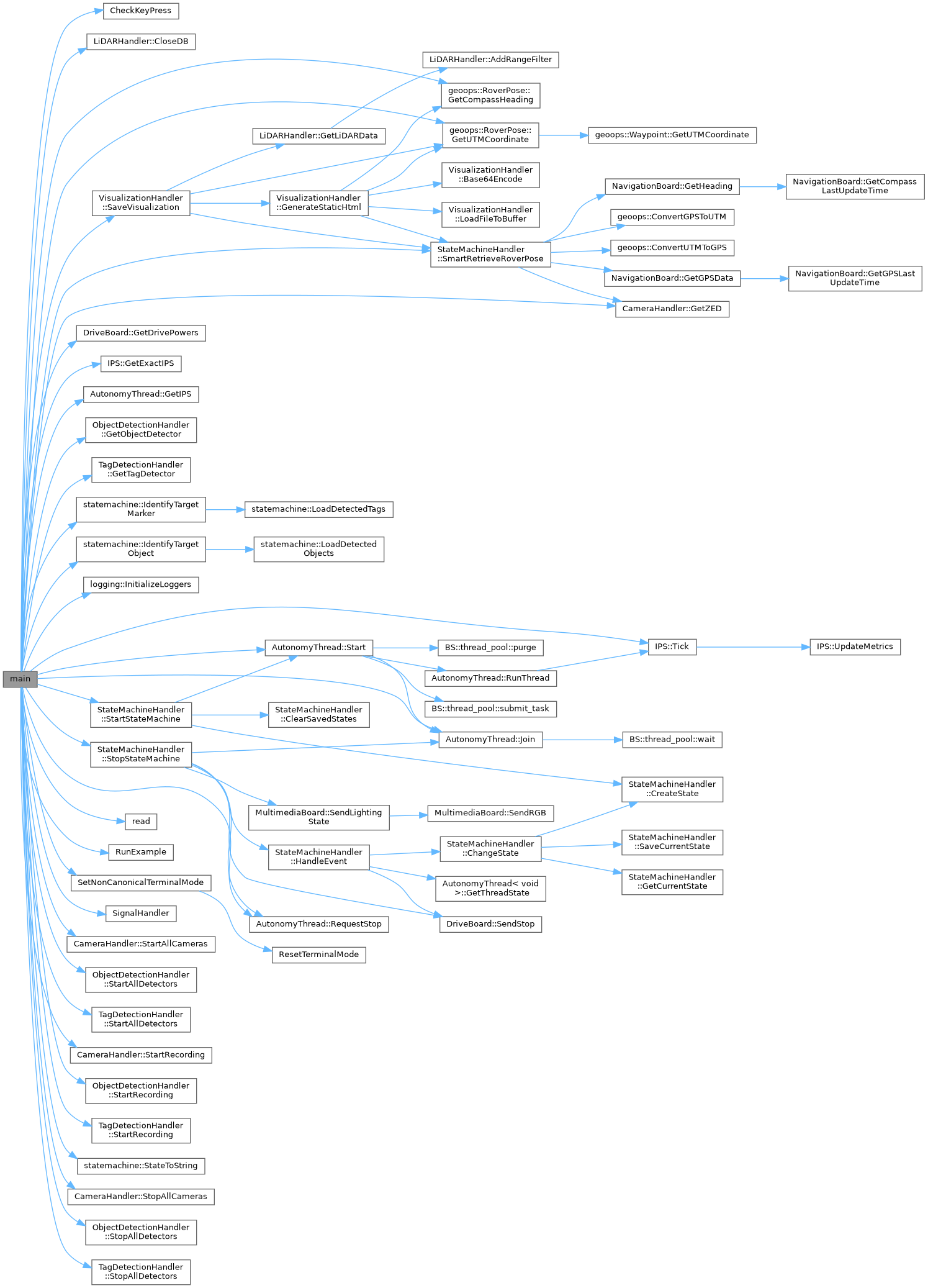
Autonomy main function.
127{
128
129 std::ifstream fHeaderText("../data/ASCII/v25.txt");
130 std::string szHeaderText;
131 if (fHeaderText.is_open())
132 {
133 std::ostringstream pHeaderText;
134 pHeaderText << fHeaderText.rdbuf();
135 szHeaderText = pHeaderText.str();
136 }
137
138 std::cout << szHeaderText << std::endl;
139 std::cout << "Copyright \u00A9 2025 - Mars Rover Design Team\n" << std::endl;
140
141
143
145
147
148 network::g_pRoveCommUDPNode = new rovecomm::RoveCommUDP();
149 network::g_pRoveCommTCPNode = new rovecomm::RoveCommTCP();
150
151 network::g_bRoveCommUDPStatus = network::g_pRoveCommUDPNode->InitUDPSocket(manifest::General::ETHERNET_UDP_PORT);
152 network::g_bRoveCommTCPStatus = network::g_pRoveCommTCPNode->InitTCPSocket(constants::ROVECOMM_TCP_INTERFACE_IP.c_str(), manifest::General::ETHERNET_TCP_PORT);
153
154
155 if (!network::g_bRoveCommUDPStatus || !network::g_bRoveCommTCPStatus)
156 {
157
158 LOG_CRITICAL(logging::g_qSharedLogger,
159 "RoveComm did not initialize properly! UDPNode Status: {}, TCPNode Status: {}",
160 network::g_bRoveCommUDPStatus.load(),
161 network::g_bRoveCommTCPStatus.load());
162
163
164 bMainStop = true;
165 }
166 else
167 {
168
169 LOG_INFO(logging::g_qSharedLogger, "RoveComm UDP and TCP nodes successfully initialized.");
170 }
171
172 network::g_pRoveCommUDPNode->AddUDPCallback<
uint8_t>(logging::SetLoggingLevelsCallback, manifest::Autonomy::COMMANDS.find(
"SETLOGGINGLEVELS")->second.DATA_ID);
173
174
178
179
180 if (bRunExampleFlag)
181 {
182
184 }
185 else
186 {
187
188 struct sigaction stSigBreak;
190 stSigBreak.sa_flags = 0;
191 sigemptyset(&stSigBreak.sa_mask);
192 sigaction(SIGINT, &stSigBreak, nullptr);
193 sigaction(SIGQUIT, &stSigBreak, nullptr);
194
196
197
198 if (constants::MODE_SIM)
199 {
200
201 for (int nIter = 0; nIter < 5; ++nIter)
202 {
203
204 LOG_WARNING(logging::g_qSharedLogger,
205 "Autonomy_Software is running in SIM mode! If you aren't currently using the Unreal RoveSoSimulator sim, disable SIM mode in CMakeLists.txt "
206 "or in your build arguments!");
207 }
208
209
210 std::this_thread::sleep_for(std::chrono::seconds(3));
211 }
212
213
220
221
222 if (!globals::g_pLiDARHandler->OpenDB(constants::LIDAR_HANDLER_DB_PATH))
223 {
224
225 LOG_ERROR(logging::g_qSharedLogger, "Failed to open LiDAR database.");
226
227 bMainStop = true;
228 }
229
230
233
234
238
242
244
245 pVisualizationHandler->
Start();
246
248
250
251 std::shared_ptr<ZEDCamera> pMainCam = globals::g_pCameraHandler->
GetZED(CameraHandler::ZEDCamName::eHeadMainCam);
252 std::shared_ptr<TagDetector> pMainTagDetector = globals::g_pTagDetectionHandler->
GetTagDetector(TagDetectionHandler::TagDetectors::eHeadMainCam);
253 std::shared_ptr<ObjectDetector> pMainObjectDetector =
254 globals::g_pObjectDetectionHandler->
GetObjectDetector(ObjectDetectionHandler::ObjectDetectors::eHeadMainCam);
255 std::shared_ptr<ZEDCamera> pRearCam = globals::g_pCameraHandler->
GetZED(CameraHandler::ZEDCamName::eRearCam);
256 std::shared_ptr<TagDetector> pRearTagDetector = globals::g_pTagDetectionHandler->
GetTagDetector(TagDetectionHandler::TagDetectors::eRearCam);
257 std::shared_ptr<ObjectDetector> pRearObjectDetector = globals::g_pObjectDetectionHandler->
GetObjectDetector(ObjectDetectionHandler::ObjectDetectors::eRearCam);
258 IPS IterPerSecond =
IPS();
259
260
261 std::vector<uint32_t> vThreadFPSValues;
262
263
264
265
266
267 while (!bMainStop)
268 {
269
270 vThreadFPSValues.clear();
272 vThreadFPSValues.push_back(
static_cast<uint32_t>(pMainCam->GetIPS().GetExactIPS()));
273 vThreadFPSValues.push_back(
static_cast<uint32_t>(pMainTagDetector->GetIPS().GetExactIPS()));
274 vThreadFPSValues.push_back(
static_cast<uint32_t>(pMainObjectDetector->GetIPS().GetExactIPS()));
275 vThreadFPSValues.push_back(
static_cast<uint32_t>(pRearCam ? pRearCam->GetIPS().GetExactIPS() : 0));
276 vThreadFPSValues.push_back(
static_cast<uint32_t>(pRearTagDetector ? pRearTagDetector->GetIPS().GetExactIPS() : 0));
277 vThreadFPSValues.push_back(
static_cast<uint32_t>(pRearObjectDetector ? pRearObjectDetector->GetIPS().GetExactIPS() : 0));
278 vThreadFPSValues.push_back(
static_cast<uint32_t>(globals::g_pStateMachineHandler->GetIPS().GetExactIPS()));
279 vThreadFPSValues.push_back(
static_cast<uint32_t>(network::g_pRoveCommUDPNode->GetIPS().GetExactIPS()));
280 vThreadFPSValues.push_back(
static_cast<uint32_t>(network::g_pRoveCommTCPNode->GetIPS().GetExactIPS()));
281
282
283 std::string szMainInfo = "";
284
285 szMainInfo += "\n--------[ Threads FPS ]--------\n";
286 szMainInfo +=
"Main Process FPS: " + std::to_string(IterPerSecond.
GetExactIPS()) +
"\n";
287 szMainInfo += "MainCam FPS: " + std::to_string(pMainCam->GetIPS().GetExactIPS()) + "\n";
288 szMainInfo += "MainTagDetector FPS: " + std::to_string(pMainTagDetector->GetIPS().GetExactIPS()) + "\n";
289 szMainInfo += "MainObjectDetector FPS: " + std::to_string(pMainObjectDetector->GetIPS().GetExactIPS()) + "\n";
290 szMainInfo += "RearCam FPS: " + std::to_string(pRearCam ? pRearCam->GetIPS().GetExactIPS() : 0) + "\n";
291 szMainInfo += "RearTagDetector FPS: " + std::to_string(pRearTagDetector ? pRearTagDetector->GetIPS().GetExactIPS() : 0) + "\n";
292 szMainInfo += "RearObjectDetector FPS: " + std::to_string(pRearObjectDetector ? pRearObjectDetector->GetIPS().GetExactIPS() : 0) + "\n";
293 szMainInfo += "\nStateMachine FPS: " + std::to_string(globals::g_pStateMachineHandler->GetIPS().GetExactIPS()) + "\n";
294 szMainInfo +=
"\nVisualizer FPS: " + std::to_string(pVisualizationHandler->
GetIPS().
GetExactIPS()) +
"\n";
295 szMainInfo += "\nRoveCommUDP FPS: " + std::to_string(network::g_pRoveCommTCPNode->GetIPS().GetExactIPS()) + "\n";
296 szMainInfo += "RoveCommTCP FPS: " + std::to_string(network::g_pRoveCommTCPNode->GetIPS().GetExactIPS()) + "\n";
297 szMainInfo += "\n--------[ State Machine Info ]--------\n";
299
300 LOG_DEBUG(logging::g_qSharedLogger, "{}", szMainInfo);
301
302
304 {
305 char chTerminalInput = 0;
306 ssize_t nBytesRead =
read(STDIN_FILENO, &chTerminalInput, 1);
307 if (nBytesRead <= 0)
308 {
309 LOG_WARNING(logging::g_qSharedLogger, "Failed to read from terminal input.");
310 }
311 else
312 {
313 if (chTerminalInput == 'h' || chTerminalInput == 'H')
314 {
315
316 LOG_NOTICE(logging::g_qSharedLogger,
317 "\n--------[ Autonomy Software Help ]--------\n"
318 "Press 'f' or 'F' to print FPS stats to the log file.\n"
319 "Press 'p' or 'P' to print rover pose info to the log file.\n"
320 "Press 's' or 'S' to print sensor data to the log file.\n"
321 "Press 'd' or 'D' to print current drive powers.\n"
322 "Press 't' or 'T' to print tag detection info to the log file.\n"
323 "Press 'm' or 'M' to print object detection info to the log file.\n"
324 "Press 'q' or 'Q' to quit the program.\n"
325 "-------------------------------------------\n");
326 }
327 else if (chTerminalInput == 'f' || chTerminalInput == 'F')
328 {
329 LOG_NOTICE(logging::g_qSharedLogger, "{}", szMainInfo);
330 }
331 else if (chTerminalInput == 'p' || chTerminalInput == 'P')
332 {
333
335
336 std::string szRoverPoseInfo = "\n--------[ Rover Pose Info ]--------\n";
337 szRoverPoseInfo +=
"Easting: " + std::to_string(stCurrentRoverPose.
GetUTMCoordinate().dEasting) +
"\n";
338 szRoverPoseInfo +=
"Northing: " + std::to_string(stCurrentRoverPose.
GetUTMCoordinate().dNorthing) +
"\n";
339 szRoverPoseInfo +=
"Altitude: " + std::to_string(stCurrentRoverPose.
GetUTMCoordinate().dAltitude) +
"\n";
340 szRoverPoseInfo +=
"Compass: " + std::to_string(stCurrentRoverPose.
GetCompassHeading()) +
"\n";
341
342 LOG_NOTICE(logging::g_qSharedLogger, "{}", szRoverPoseInfo);
343 }
344 else if (chTerminalInput == 's' || chTerminalInput == 'S')
345 {
346
347 sl::SensorsData slSensorData;
348 std::future<bool> fuResult = pMainCam->RequestSensorsCopy(slSensorData);
349
350
351 if (fuResult.get())
352 {
353
354 std::string szSensorDataInfo = "\n--------[ Sensor Data Info ]--------\n";
355 szSensorDataInfo += "IMU Accel X: " + std::to_string(slSensorData.imu.linear_acceleration.x) + "\n";
356 szSensorDataInfo += "IMU Accel Y: " + std::to_string(slSensorData.imu.linear_acceleration.y) + "\n";
357 szSensorDataInfo += "IMU Accel Z: " + std::to_string(slSensorData.imu.linear_acceleration.z) + "\n";
358 szSensorDataInfo += "IMU AngVel X: " + std::to_string(slSensorData.imu.angular_velocity.x) + "\n";
359 szSensorDataInfo += "IMU AngVel Y: " + std::to_string(slSensorData.imu.angular_velocity.y) + "\n";
360 szSensorDataInfo += "IMU AngVel Z: " + std::to_string(slSensorData.imu.angular_velocity.z) + "\n";
361 szSensorDataInfo += "IMU Gyro X:" + std::to_string(slSensorData.imu.pose.getEulerAngles(false).x) + "\n";
362 szSensorDataInfo += "IMU Gyro Y: " + std::to_string(slSensorData.imu.pose.getEulerAngles(false).y) + "\n";
363 szSensorDataInfo += "IMU Gyro Z: " + std::to_string(slSensorData.imu.pose.getEulerAngles(false).z) + "\n";
364
365 LOG_NOTICE(logging::g_qSharedLogger, "{}", szSensorDataInfo);
366 }
367 }
368 else if (chTerminalInput == 'd' || chTerminalInput == 'D')
369 {
370
372
373 std::string szDrivePowersInfo = "\n--------[ Drive Powers Info ]--------\n";
374 szDrivePowersInfo += "Left Power: " + std::to_string(stCurrentDrivePowers.dLeftDrivePower) + "\n";
375 szDrivePowersInfo += "Right Power: " + std::to_string(stCurrentDrivePowers.dRightDrivePower) + "\n";
376
377 LOG_NOTICE(logging::g_qSharedLogger, "{}", szDrivePowersInfo);
378 }
379 else if (chTerminalInput == 't' || chTerminalInput == 'T')
380 {
381
382 if (pMainTagDetector->GetIsReady())
383 {
384
386 int nTagCount = 0;
387
388
389 std::vector<std::shared_ptr<TagDetector>> vTagDetectors = {pMainTagDetector};
390
391 if (globals::g_pWaypointHandler->GetWaypointCount() > 0)
392 {
393
395 stBestOpenCVTag,
396 stBestTorchTag,
397 globals::g_pWaypointHandler->PeekNextWaypoint().nID);
398 }
399 else
400 {
401
403 }
404
405
406 std::ostringstream ossTagsInfo;
407 ossTagsInfo << "\n--------[ All Detections ]--------\n"
408 << "Detected Tags Info:\n"
409 << "Total Tags: " << nTagCount << "\n";
410
411 ossTagsInfo << "\n--------[ Valid/Best Tags ]--------\n";
412 if (stBestOpenCVTag.nID != -1)
413 {
414 ossTagsInfo << "Best OpenCV Tag ID: " << stBestOpenCVTag.nID << "\n";
415 ossTagsInfo << "Best OpenCV Tag Distance: " << stBestOpenCVTag.dStraightLineDistance << "\n";
416 ossTagsInfo << "Best OpenCV Tag Yaw Angle: " << stBestOpenCVTag.dYawAngle << "\n";
417 }
418 else
419 {
420 ossTagsInfo << "No valid OpenCV tags detected.\n";
421 }
422 if (stBestTorchTag.dConfidence != 0.0)
423 {
424 ossTagsInfo << "Best Torch Tag ID: " << stBestTorchTag.nID << "\n";
425 ossTagsInfo << "Best Torch Tag Distance: " << stBestTorchTag.dStraightLineDistance << "\n";
426 ossTagsInfo << "Best Torch Tag Yaw Angle: " << stBestTorchTag.dYawAngle << "\n";
427 }
428 else
429 {
430 ossTagsInfo << "No valid Torch tags detected.\n";
431 }
432
433 LOG_NOTICE(logging::g_qSharedLogger, "{}", ossTagsInfo.str());
434 }
435 else
436 {
437
438 LOG_WARNING(logging::g_qSharedLogger, "Tag Detector is not ready yet. Cannot get tags.");
439 }
440 }
441 else if (chTerminalInput == 'm' || chTerminalInput == 'M')
442 {
443
444 if (pMainObjectDetector->GetIsReady())
445 {
446
448 int nObjectCount = 0;
449
450
451 std::vector<std::shared_ptr<ObjectDetector>> vTagDetectors = {pMainObjectDetector, pRearObjectDetector};
452
454
455
456 std::ostringstream ossTagsInfo;
457 ossTagsInfo << "\n--------[ All Detections ]--------\n"
458 << "Detected Object Info:\n"
459 << "Total Object: " << nObjectCount << "\n";
460
461 ossTagsInfo << "\n--------[ Valid/Best Objects ]--------\n";
462 if (stBestTorchObject.dConfidence != 0.0)
463 {
464 ossTagsInfo << "Best Torch Object Distance: " << stBestTorchObject.dStraightLineDistance << "\n";
465 ossTagsInfo << "Best Torch Object Yaw Angle: " << stBestTorchObject.dYawAngle << "\n";
466 }
467 else
468 {
469 ossTagsInfo << "No valid Torch objects detected.\n";
470 }
471
472 LOG_NOTICE(logging::g_qSharedLogger, "{}", ossTagsInfo.str());
473 }
474 else
475 {
476
477 LOG_WARNING(logging::g_qSharedLogger, "Object Detector is not ready yet. Cannot get objects.");
478 }
479 }
480 else if (chTerminalInput == 'q' || chTerminalInput == 'Q')
481 {
482 LOG_INFO(logging::g_qSharedLogger, "'Q' key pressed. Initiating shutdown...");
483 bMainStop = true;
484 }
485 }
486 }
487
489
491
492 if (network::g_pRoveCommUDPNode)
493 {
494
495 rovecomm::RoveCommPacket<uint32_t> stPacket;
496 stPacket.unDataId = manifest::Autonomy::TELEMETRY.find("THREADFPS")->second.DATA_ID;
497 stPacket.unDataCount = manifest::Autonomy::TELEMETRY.find("THREADFPS")->second.DATA_COUNT;
498 stPacket.eDataType = manifest::Autonomy::TELEMETRY.find("THREADFPS")->second.DATA_TYPE;
499
500 static uint32_t nThreadFPSIndex = 0;
501
502 if (nThreadFPSIndex <
static_cast<uint32_t>(vThreadFPSValues.size()))
503 {
504
505 stPacket.vData.push_back(nThreadFPSIndex + 1);
506
507 stPacket.vData.push_back(static_cast<float>(vThreadFPSValues[nThreadFPSIndex]));
508
509 nThreadFPSIndex++;
510 }
511 else
512 {
513
514 nThreadFPSIndex = 0;
515 }
516
517 network::g_pRoveCommUDPNode->SendUDPPacket(stPacket, "0.0.0.0", constants::ROVECOMM_OUTGOING_UDP_PORT);
518 }
519
520
521 IterPerSecond.
Tick();
522
523
524 std::this_thread::sleep_for(std::chrono::microseconds(66666));
525 }
526
528
530
531
533
534
536 pVisualizationHandler->
Join();
537
538
539 pVisualizationHandler->
SaveVisualization(constants::LOGGING_OUTPUT_PATH_ABSOLUTE + logging::g_szProgramStartTimeString +
"/visualization.html");
540
541
544
545
546 if (pMainCam->GetSpatialMappingState() == sl::SPATIAL_MAPPING_STATE::OK)
547 {
548
549 LOG_INFO(logging::g_qSharedLogger, "Exporting ZED spatial map...");
550
551 std::future<sl::Mesh> fuSpatialMap;
552 pMainCam->ExtractSpatialMapAsync(fuSpatialMap);
553 sl::Mesh slSpatialMap = fuSpatialMap.get();
554 std::string szFilePath = constants::LOGGING_OUTPUT_PATH_ABSOLUTE + logging::g_szProgramStartTimeString + "/spatial_map";
555 slSpatialMap.save(szFilePath.c_str(), sl::MESH_FILE_FORMAT::PLY);
556 }
557
558
560
561
562 globals::g_pLiDARHandler->
CloseDB();
563
564
565 delete pVisualizationHandler;
566 delete globals::g_pGeoPlanner;
567 delete globals::g_pStateMachineHandler;
568 delete globals::g_pObjectDetectionHandler;
569 delete globals::g_pTagDetectionHandler;
570 delete globals::g_pCameraHandler;
571 delete globals::g_pWaypointHandler;
572 delete globals::g_pLiDARHandler;
573
574 pVisualizationHandler = nullptr;
575 globals::g_pGeoPlanner = nullptr;
576 globals::g_pStateMachineHandler = nullptr;
577 globals::g_pObjectDetectionHandler = nullptr;
578 globals::g_pTagDetectionHandler = nullptr;
579 globals::g_pCameraHandler = nullptr;
580 globals::g_pWaypointHandler = nullptr;
581 globals::g_pLiDARHandler = nullptr;
582 }
583
584
585 network::g_bRoveCommUDPStatus = false;
586 network::g_bRoveCommTCPStatus = false;
587
588 delete globals::g_pDriveBoard;
589 delete globals::g_pMultimediaBoard;
590 delete globals::g_pNavigationBoard;
591
592
593 LOG_INFO(logging::g_qSharedLogger, "Stopping RoveComm...");
594 network::g_pRoveCommUDPNode->CloseUDPSocket();
595 network::g_pRoveCommTCPNode->CloseTCPSocket();
596 delete network::g_pRoveCommUDPNode;
597 delete network::g_pRoveCommTCPNode;
598
599
600 globals::g_pDriveBoard = nullptr;
601 globals::g_pMultimediaBoard = nullptr;
602 globals::g_pNavigationBoard = nullptr;
603 network::g_pRoveCommUDPNode = nullptr;
604 network::g_pRoveCommTCPNode = nullptr;
605
606
607 LOG_INFO(logging::g_qSharedLogger, "Clean up finished. Exiting...");
608
609
610 return 0;
611}
void RunExample()
Example function to demonstrate the usage of LiDARHandler.
Definition GeoPlanner.hpp:25
void Join()
Waits for thread to finish executing and then closes thread. This method will block the calling code ...
Definition AutonomyThread.hpp:203
void RequestStop()
Signals threads to stop executing user code, terminate. DOES NOT JOIN. This method will not force the...
Definition AutonomyThread.hpp:187
IPS & GetIPS()
Accessor for the Frame I P S private member.
Definition AutonomyThread.hpp:257
void Start()
When this method is called, it starts a new thread that runs the code within the ThreadedContinuousCo...
Definition AutonomyThread.hpp:134
The CameraHandler class is responsible for managing all of the camera feeds that Autonomy_Software us...
Definition CameraHandler.h:34
void StopAllCameras()
Signals all cameras to stop their threads.
Definition CameraHandler.cpp:173
void StartAllCameras()
Signals all cameras to start their threads.
Definition CameraHandler.cpp:146
void StartRecording()
Signal the RecordingHandler to start recording video feeds from the CameraHandler.
Definition CameraHandler.cpp:160
std::shared_ptr< ZEDCamera > GetZED(ZEDCamName eCameraName)
Accessor for ZED cameras.
Definition CameraHandler.cpp:215
This class handles communication with the drive board on the rover by sending RoveComm packets over t...
Definition DriveBoard.h:35
diffdrive::DrivePowers GetDrivePowers() const
Accessor for the current drive powers of the robot.
Definition DriveBoard.cpp:346
This util class provides an easy way to keep track of iterations per second for any body of code.
Definition IPS.hpp:30
double GetExactIPS() const
Accessor for the Current I P S private member. This method will return the immediate IPS since the la...
Definition IPS.hpp:165
void Tick()
This method is used to update the iterations per second counter and recalculate all of the IPS metric...
Definition IPS.hpp:138
The LiDARHandler class manages runtime queries against a LiDAR point cloud database for autonomy navi...
Definition LiDARHandler.h:40
bool CloseDB()
Closes the currently open LiDAR DuckDB connection.
Definition LiDARHandler.cpp:112
This class handles communication with the navigation board on the rover by sending RoveComm packets o...
Definition NavigationBoard.h:33
The ObjectDetectionHandler class is responsible for managing all of the different detectors that Auto...
Definition ObjectDetectionHandler.h:28
void StartAllDetectors()
Signals all detectors to start their threads.
Definition ObjectDetectionHandler.cpp:86
void StartRecording()
Signal the RecordingHandler to start recording feeds from the detectors.
Definition ObjectDetectionHandler.cpp:102
std::shared_ptr< ObjectDetector > GetObjectDetector(ObjectDetectors eDetectorName)
Accessor for ObjectDetector detectors.
Definition ObjectDetectionHandler.cpp:153
void StopAllDetectors()
Signals all detectors to stop their threads.
Definition ObjectDetectionHandler.cpp:115
The StateMachineHandler class serves as the main state machine for Autonomy Software....
Definition StateMachineHandler.h:44
void StartStateMachine()
This method will start the state machine. It will set the first state to Idle and start the thread po...
Definition StateMachineHandler.cpp:192
void StopStateMachine()
This method will stop the state machine. It will signal whatever state is currently running to abort ...
Definition StateMachineHandler.cpp:217
geoops::RoverPose SmartRetrieveRoverPose(bool bIMUHeading=true)
This method is used to retrieve the rover's current position and heading. It uses the GPS data from t...
Definition StateMachineHandler.cpp:375
The TagDetectionHandler class is responsible for managing all of the different detectors that Autonom...
Definition TagDetectionHandler.h:28
void StopAllDetectors()
Signals all detectors to stop their threads.
Definition TagDetectionHandler.cpp:125
void StartAllDetectors()
Signals all detectors to start their threads.
Definition TagDetectionHandler.cpp:96
void StartRecording()
Signal the RecordingHandler to start recording video feeds from the TagDetectionHandler.
Definition TagDetectionHandler.cpp:112
std::shared_ptr< TagDetector > GetTagDetector(TagDetectors eDetectorName)
Accessor for TagDetector detectors.
Definition TagDetectionHandler.cpp:163
The VisualizationHandler class manages persistent world state and hosts a 3D web server for interacti...
Definition VisualizationHandler.h:35
void SaveVisualization(const std::string &szFilename)
Save the current visualization to a single HTML file with embedded assets.
Definition VisualizationHandler.cpp:143
The WaypointHandler class is used throughout the entire project (mainly by the state machine) to glob...
Definition WaypointHandler.h:33
This class implements a geospatial path planner that uses a discrete 2.5D Costmap and a fast Weighted...
Definition GeoPlanner.h:49
void SetNonCanonicalTerminalMode()
Mutator for the Non Canonical Terminal Mode private member.
Definition main.cpp:90
int CheckKeyPress()
Check if a key has been pressed in the terminal.
Definition main.cpp:111
void SignalHandler(int nSignal)
Help function given to the C++ csignal standard library to run when a CONTROL^C is given from the ter...
Definition main.cpp:49
void read(const FileNode &fn, optflow::GPCTree::Node &node, optflow::GPCTree::Node)
void InitializeLoggers(std::string szLoggingOutputPath, std::string szProgramTimeLogsDir)
Logger Initializer - Sets Up all the logging handlers required for having the above loggers.
Definition AutonomyLogging.cpp:57
int IdentifyTargetMarker(const std::vector< std::shared_ptr< TagDetector > > &vTagDetectors, tagdetectutils::ArucoTag &stArucoTarget, tagdetectutils::ArucoTag &stTorchTarget, const int nTargetTagID=static_cast< int >(manifest::Autonomy::AUTONOMYWAYPOINTTYPES::ANY))
Identify a target marker in the rover's vision, using OpenCV detection.
Definition TagDetectionChecker.hpp:100
std::string StateToString(States eState)
Converts a state object to a string.
Definition State.hpp:85
int IdentifyTargetObject(const std::vector< std::shared_ptr< ObjectDetector > > &vObjectDetectors, objectdetectutils::Object &stObjectTarget, const geoops::WaypointType &eDesiredDetectionType=geoops::WaypointType::eUNKNOWN)
Identify a target object in the rover's vision, using Torch detection.
Definition ObjectDetectionChecker.hpp:101
This struct is used to store the left and right drive powers for the robot. Storing these values in a...
Definition DifferentialDrive.hpp:73
This struct is used by the WaypointHandler to provide an easy way to store all pose data about the ro...
Definition GeospatialOperations.hpp:708
double GetCompassHeading() const
Accessor for the Compass Heading private member.
Definition GeospatialOperations.hpp:787
const geoops::UTMCoordinate & GetUTMCoordinate() const
Accessor for the geoops::UTMCoordinate member variable.
Definition GeospatialOperations.hpp:767
Represents a single detected object.
Definition ObjectDetectionUtility.hpp:73
Represents a single ArUco tag.
Definition TagDetectionUtilty.hpp:57