This method is used to retrieve the rover's current position and heading. It uses the GPS data from the NavBoard and if enabled, it can also fuse the ZEDCam's IMU heading data for a more accurate heading estimation. The method returns a RoverPose struct that contains the current GPS coordinate and the fused heading of the rover.
376{
377
379 double dCurrentGPSHeading = globals::g_pNavigationBoard->
GetHeading();
380
381
382 double dFusedHeading = dCurrentGPSHeading;
383
384 if ((bIMUHeading) && !constants::MODE_SIM && m_pMainCam->GetCameraIsOpen())
385 {
386
389
390
391 sl::SensorsData slCurrentCameraSensorData;
392 std::future<bool> fuResultStatus = m_pMainCam->RequestSensorsCopy(slCurrentCameraSensorData);
393
394 if (fuResultStatus.get())
395 {
396
397 double dCurrentZEDHeading = slCurrentCameraSensorData.imu.pose.getEulerAngles(false).y;
398
399
400 if ((m_pCurrentState != nullptr && m_pCurrentState->GetState() == statemachine::States::eIdle) ||
401 (std::abs(dVelocity) > constants::ZED_REALIGN_VEL_THRESH && std::abs(dAngularVel) < constants::ZED_REALIGN_ROT_THRESH))
402 {
404 }
405
406
408 }
409 }
410
411
413 LOG_DEBUG(logging::g_qSharedLogger,
414 "Rover Pose is currently: {} (easting), {} (northing), {} (alt), {} (degrees), IMUHeading = {}",
415 stCurrentUTMPosition.dEasting,
416 stCurrentUTMPosition.dNorthing,
417 stCurrentUTMPosition.dAltitude,
418 dFusedHeading,
419 bIMUHeading ? "true" : "false");
420
422}
double GetHeading()
Accessor for the most recent compass heading received from the NavBoard.
Definition NavigationBoard.cpp:182
geoops::GPSCoordinate GetGPSData()
Accessor for most recent GPS data received from NavBoard.
Definition NavigationBoard.cpp:78
void RealignZEDHeading(const double dNewActualHeading, const double dCurrentZEDHeading)
This method is used to realign the ZED camera's heading with the actual heading of the rover....
Definition StateMachineHandler.cpp:467
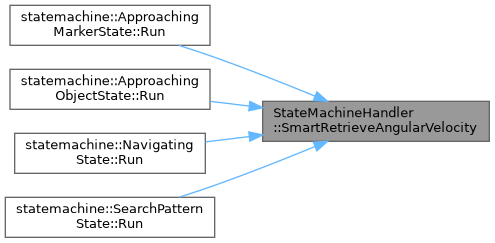
double SmartRetrieveAngularVelocity()
Retrieve the rover's current velocity. Currently there is no easy way to get the velocity of the ZEDC...
Definition StateMachineHandler.cpp:450
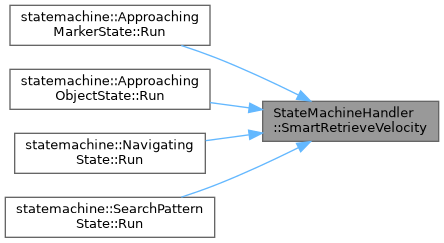
double SmartRetrieveVelocity()
Retrieve the rover's current velocity. Currently there is no easy way to get the velocity of the ZEDC...
Definition StateMachineHandler.cpp:434
UTMCoordinate ConvertGPSToUTM(const GPSCoordinate &stGPSCoord)
Given a GPS coordinate, convert to UTM and create a new UTMCoordinate object.
Definition GeospatialOperations.hpp:333
constexpr T InputAngleModulus(T tValue, T tMinValue, T tMaxValue)
Calculates the modulus of an input angle.
Definition NumberOperations.hpp:162
This struct stores/contains information about a GPS data.
Definition GeospatialOperations.hpp:100
This struct is used by the WaypointHandler to provide an easy way to store all pose data about the ro...
Definition GeospatialOperations.hpp:708
This struct stores/contains information about a UTM coordinate.
Definition GeospatialOperations.hpp:211
 Private Member Functions inherited from
Private Member Functions inherited from