This interface class serves as a base for all other classes that will implement and interface with a type of camera.
More...
|
| | Camera (const int nPropResolutionX, const int nPropResolutionY, const int nPropFramesPerSecond, const PIXEL_FORMATS ePropPixelFormat, const double dPropHorizontalFOV, const double dPropVerticalFOV, const bool bEnableRecordingFlag, const int nNumFrameRetrievalThreads=5) |
| | Construct a new Camera object.
|
| |
| virtual | ~Camera () |
| | Destroy the Camera object.
|
| |
| void | SetEnableRecordingFlag (const bool bEnableRecordingFlag) |
| | Mutator for the Enable Recording Flag private member.
|
| |
| void | SetCameraPoseOffset (const Pose &stPoseOffset) |
| | Mutator for the Camera Pose Offset private member.
|
| |
| void | SetCameraPoseOffset (const double dPosX, const double dPosY, const double dPosZ, const double dQX, const double dQY, const double dQZ, const double dQW) |
| | Mutator for the Camera Pose Offset private member.
|
| |
| cv::Size | GetPropResolution () const |
| | Accessor for the Prop Resolution private member.
|
| |
| int | GetPropFramesPerSecond () const |
| | Accessor for the Prop Frames Per Second private member.
|
| |
| PIXEL_FORMATS | GetPropPixelFormat () const |
| | Accessor for the Prop Pixel Format private member.
|
| |
| double | GetPropHorizontalFOV () const |
| | Accessor for the Prop Horizontal F O V private member.
|
| |
| double | GetPropVerticalFOV () const |
| | Accessor for the Prop Vertical F O V private member.
|
| |
| bool | GetEnableRecordingFlag () const |
| | Accessor for the Enable Recording Flag private member.
|
| |
| Pose | GetCameraPoseOffset () const |
| | Accessor for the Camera Pose Offset private member.
|
| |
| virtual bool | GetCameraIsOpen ()=0 |
| | Accessor for the Camera Is Open private member.
|
| |
| | AutonomyThread () |
| | Construct a new Autonomy Thread object.
|
| |
| virtual | ~AutonomyThread () |
| | Destroy the Autonomy Thread object. If the parent object or main thread is destroyed or exited while this thread is still running, a race condition will occur. Stopping and joining the thread here insures that the main program can't exit if the user forgot to stop and join the thread.
|
| |
| void | Start () |
| | When this method is called, it starts a new thread that runs the code within the ThreadedContinuousCode method. This is the users main code that will run the important and continuous code for the class.
|
| |
| void | RequestStop () |
| | Signals threads to stop executing user code, terminate. DOES NOT JOIN. This method will not force the thread to exit, if the user code is not written properly and contains WHILE statement or any other long-executing or blocking code, then the thread will not exit until the next iteration.
|
| |
| void | Join () |
| | Waits for thread to finish executing and then closes thread. This method will block the calling code until thread is finished.
|
| |
| bool | Joinable () const |
| | Check if the code within the thread and all pools created by it are finished executing and the thread is ready to be closed.
|
| |
| AutonomyThreadState | GetThreadState () const |
| | Accessor for the Threads State private member.
|
| |
| std::string | GetThreadUUID () const |
| | Accessor for the Thread U U I D private member.
|
| |
| IPS & | GetIPS () |
| | Accessor for the Frame I P S private member.
|
| |
| void | SetMainThreadPriority (AutonomyThreadPriority ePriority) |
| | Set the OS priority for the main continuous thread.
|
| |
| void | SetPoolThreadPriority (AutonomyThreadPriority ePriority) |
| | Set the OS priority for the highly parallelized pool threads.
|
| |
|
| virtual std::future< bool > | RequestFrameCopy (T &tFrame)=0 |
| |
| void | RunPool (const unsigned int nNumTasksToQueue, const unsigned int nNumThreads=2, const bool bForceStopCurrentThreads=false) |
| | When this method is called, it starts/adds tasks to a thread pool that runs nNumTasksToQueue copies of the code within the PooledLinearCode() method using nNumThreads number of threads. This is meant to be used as an internal utility of the child class to further improve parallelization. Default value for nNumThreads is 2.
|
| |
| void | RunDetachedPool (const unsigned int nNumTasksToQueue, const unsigned int nNumThreads=2, const bool bForceStopCurrentThreads=false) |
| | When this method is called, it starts a thread pool full of threads that don't return std::futures (like a placeholder for the thread return type). This means the thread will not have a return type and there is no way to determine if the thread has finished other than calling the Join() method. Only use this if you want to 'set and forget'. It will be faster as it doesn't return futures. Runs PooledLinearCode() method code. This is meant to be used as an internal utility of the child class to further improve parallelization.
|
| |
| void | ParallelizeLoop (const int nNumThreads, const N tTotalIterations, F &&tLoopFunction) |
| | Given a ref-qualified looping function and an arbitrary number of iterations, this method will divide up the loop and run each section in a thread pool. This function must not return anything. This method will block until the loop has completed.
|
| |
| void | ClearPoolQueue () |
| | Clears any tasks waiting to be ran in the queue, tasks currently running will remain running.
|
| |
| void | JoinPool () |
| | Waits for pool to finish executing tasks. This method will block the calling code until thread is finished.
|
| |
| bool | PoolJoinable () const |
| | Check if the internal pool threads are done executing code and the queue is empty.
|
| |
| void | SetMainThreadIPSLimit (int nMaxIterationsPerSecond=0) |
| | Mutator for the Main Thread Max I P S private member.
|
| |
| int | GetPoolNumOfThreads () |
| | Accessor for the Pool Num Of Threads private member.
|
| |
| int | GetPoolQueueLength () |
| | Accessor for the Pool Queue Size private member.
|
| |
| std::vector< void > | GetPoolResults () |
| | Accessor for the Pool Results private member. The action of getting results will destroy and remove them from this object. This method blocks if the thread is not finished, so no need to call JoinPool() before getting results.
|
| |
| int | GetMainThreadMaxIPS () const |
| | Accessor for the Main Thread Max I P S private member.
|
| |
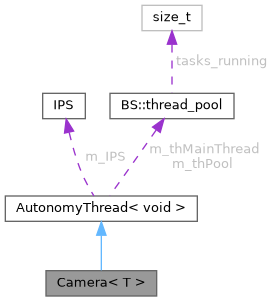
template<class T>
class Camera< T >
This interface class serves as a base for all other classes that will implement and interface with a type of camera.
- Author
- ClayJay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2023-08-17
 Public Member Functions inherited from
Public Member Functions inherited from