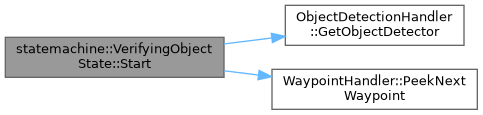
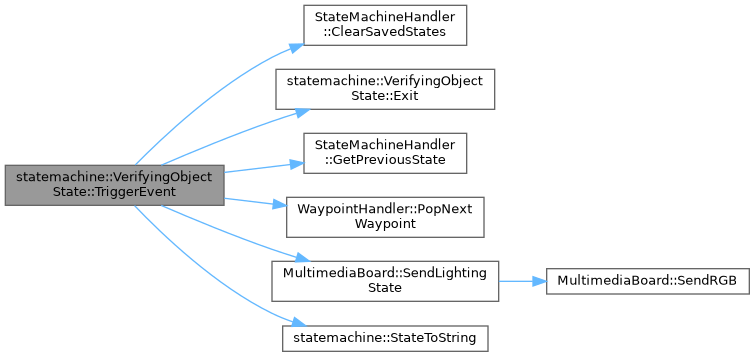
Trigger an event in the state machine. Returns the next state.
165 {
166
167 States eNextState = States::eVerifyingObject;
168 bool bCompleteStateExit = true;
169
170 switch (eEvent)
171 {
172 case Event::eStart:
173 {
174
175 LOG_INFO(logging::g_qSharedLogger, "VerifyingObjectState: Handling Start event.");
176
177 globals::g_pMultimediaBoard->
SendLightingState(MultimediaBoard::MultimediaBoardLightingState::eAutonomy);
178 break;
179 }
180 case Event::eVerifyingComplete:
181 {
182
183 LOG_INFO(logging::g_qSharedLogger, "VerifyingObjectState: Handling Verifying Complete event.");
184
185 globals::g_pMultimediaBoard->
SendLightingState(MultimediaBoard::MultimediaBoardLightingState::eReachedGoal);
186
187
188
190 for (const std::shared_ptr<ObjectDetector>& pObjectDetector : m_vObjectDetectors)
191 {
192 if (pObjectDetector->GetThreadUUID() == m_stBestObject.szDetectorUUID)
193 {
194 std::future<bool> fuFrame = pObjectDetector->RequestLastGoodDetectionOverlayFrame(cvSnapshot);
195 if (!fuFrame.get())
196 {
197 LOG_WARNING(logging::g_qSharedLogger, "VerifyingObjectState: Failed to request detection overlay frame.");
198 }
199 break;
200 }
201 }
202
203
204 if (!cvSnapshot.
empty())
205 {
206 std::string szLogDir = logging::g_szLoggingOutputPath + "/detections/";
207 if (!std::filesystem::exists(szLogDir))
208 {
209 std::filesystem::create_directories(szLogDir);
210 }
211
212
214 std::string szFilename = szLogDir + "object_" + szTimestamp + ".png";
215
216
217 bool bSuccess =
cv::imwrite(szFilename, cvSnapshot);
218
219 if (bSuccess)
220 {
221 LOG_INFO(logging::g_qSharedLogger, "VerifyingObjectState: Saved detection snapshot to {}", szFilename);
222 }
223 else
224 {
225 LOG_ERROR(logging::g_qSharedLogger, "VerifyingObjectState: Failed to write snapshot to disk.");
226 }
227 }
228 else
229 {
230 LOG_WARNING(logging::g_qSharedLogger, "VerifyingObjectState: Overlay frame was empty. No snapshot taken.");
231 }
232
233
235
237
238 LOG_NOTICE(logging::g_qSharedLogger, "VerifyingObjectState: Cleared old saved states.");
239
240 eNextState = States::eIdle;
241 break;
242 }
243 case Event::eVerifyingFailed:
244 {
245
246 LOG_INFO(logging::g_qSharedLogger, "VerifyingObjectState: Handling Verifying Failed/Object Unseen event.");
247
248 globals::g_pMultimediaBoard->
SendLightingState(MultimediaBoard::MultimediaBoardLightingState::eAutonomy);
249
251 break;
252 }
253 case Event::eStuck:
254 {
255 LOG_INFO(logging::g_qSharedLogger, "NavigatingState: Handling Stuck event.");
256 eNextState = States::eStuck;
257 break;
258 }
259 case Event::eAbort:
260 {
261
262 LOG_INFO(logging::g_qSharedLogger, "VerifyingObjectState: Handling Abort event.");
263
264 globals::g_pMultimediaBoard->
SendLightingState(MultimediaBoard::MultimediaBoardLightingState::eOff);
265
266 eNextState = States::eIdle;
267 break;
268 }
269 default:
270 {
271 LOG_WARNING(logging::g_qSharedLogger, "VerifyingObjectState: Handling unknown event.");
272 eNextState = States::eIdle;
273 break;
274 }
275 }
276
277 if (eNextState != States::eVerifyingObject)
278 {
279 LOG_INFO(logging::g_qSharedLogger,
"VerifyingObjectState: Transitioning to {} State.",
StateToString(eNextState));
280
281
282 if (bCompleteStateExit)
283 {
285 }
286 }
287
288 return eNextState;
289 }
void ClearSavedStates()
Clear all saved states.
Definition StateMachineHandler.cpp:311
statemachine::States GetPreviousState() const
Accessor for the Previous State private member.
Definition StateMachineHandler.cpp:358
geoops::Waypoint PopNextWaypoint()
Removes and returns the next waypoint at the front of the list.
Definition WaypointHandler.cpp:500
void Exit() override
This method is called when the state is exited. It is used to clean up the state.
Definition VerifyingObjectState.cpp:60
bool imwrite(const String &filename, InputArray img, const std::vector< int > ¶ms=std::vector< int >())
std::string StateToString(States eState)
Converts a state object to a string.
Definition State.hpp:85
States
The states that the state machine can be in.
Definition State.hpp:31
std::string GetTimestamp(const std::string &szFormat="%Y%m%d-%H%M%S")
Accessor for getting the current time in a specified format.
Definition TimeOperations.hpp:42
 Public Member Functions inherited from
Public Member Functions inherited from