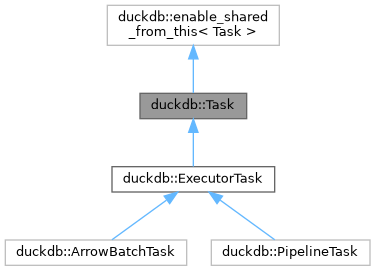
Generic parallel task.
More...
#include <duckdb.hpp>
◆ ~Task()
◆ Execute()
| virtual TaskExecutionResult duckdb::Task::Execute |
( |
TaskExecutionMode |
mode | ) |
|
|
pure virtual |
Execute the task in the specified execution mode If mode is PROCESS_ALL, Execute should always finish processing and return TASK_FINISHED If mode is PROCESS_PARTIAL, Execute can return TASK_NOT_FINISHED, in which case Execute will be called again In case of an error, TASK_ERROR is returned In case the task has interrupted, BLOCKED is returned.
Implemented in duckdb::ExecutorTask.
◆ Deschedule()
Descheduling a task ensures the task is not executed, but remains available for rescheduling as long as required, generally until some code in an operator calls the InterruptState::Callback() method of a state of the InterruptMode::TASK mode.
Reimplemented in duckdb::ExecutorTask.
21807 {
21808 throw InternalException("Cannot deschedule task of base Task class");
21809 };
◆ Reschedule()
Ensures a task is rescheduled to the correct queue.
Reimplemented in duckdb::ExecutorTask.
21812 {
21813 throw InternalException("Cannot reschedule task of base Task class");
21814 }
◆ TaskBlockedOnResult()
| virtual bool duckdb::Task::TaskBlockedOnResult |
( |
| ) |
const |
|
inlinevirtual |
21816 {
21817 return false;
21818 }
◆ TaskType()
| virtual string duckdb::Task::TaskType |
( |
| ) |
const |
|
inlinevirtual |
21820 {
21821 return "UnnamedTask";
21822 }
The documentation for this class was generated from the following file:
 Public Member Functions inherited from
Public Member Functions inherited from