|
|
DUCKDB_API | PreparedStatementData (StatementType type) |
| |
|
void | CheckParameterCount (idx_t parameter_count) |
| |
|
bool | RequireRebind (ClientContext &context, optional_ptr< case_insensitive_map_t< BoundParameterData > > values) |
| | Whether or not the prepared statement data requires the query to rebound for the given parameters.
|
| |
|
DUCKDB_API void | Bind (case_insensitive_map_t< BoundParameterData > values) |
| | Bind a set of values to the prepared statement data.
|
| |
|
DUCKDB_API LogicalType | GetType (const string &identifier) |
| | Get the expected SQL Type of the bound parameter.
|
| |
|
DUCKDB_API bool | TryGetType (const string &identifier, LogicalType &result) |
| | Try to get the expected SQL Type of the bound parameter.
|
| |
|
|
StatementType | statement_type |
| |
|
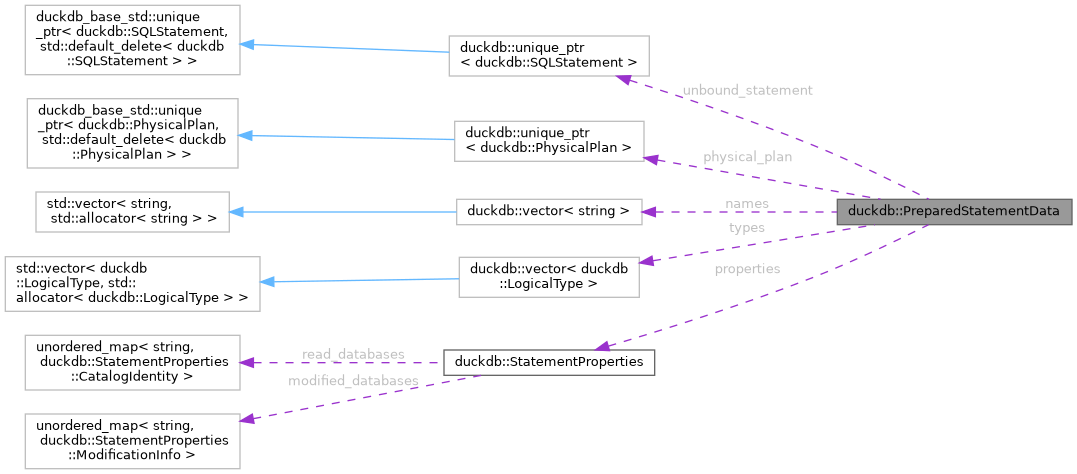
unique_ptr< SQLStatement > | unbound_statement |
| | The unbound SQL statement that was prepared.
|
| |
|
unique_ptr< PhysicalPlan > | physical_plan |
| | The physical plan.
|
| |
|
vector< string > | names |
| | The result names of the transaction.
|
| |
|
vector< LogicalType > | types |
| | The result types of the transaction.
|
| |
|
StatementProperties | properties |
| | The statement properties.
|
| |
|
bound_parameter_map_t | value_map |
| | The map of parameter index to the actual value entry.
|
| |
|
QueryResultOutputType | output_type |
| | Whether we are creating a streaming result or not.
|
| |
|
QueryResultMemoryType | memory_type |
| | Whether we are creating a buffer-managed result or not.
|
| |
The documentation for this class was generated from the following file:
- external/duckdb/duckdb.cpp