|
|
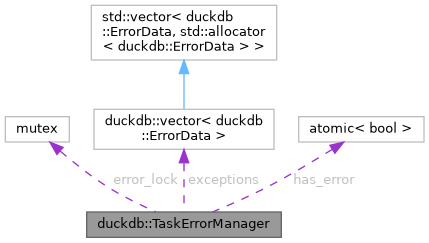
mutex | error_lock |
| |
|
vector< ErrorData > | exceptions |
| | Exceptions that occurred during the execution of the current query.
|
| |
|
atomic< bool > | has_error |
| | Lock-free error flag.
|
| |
◆ TaskErrorManager()
| duckdb::TaskErrorManager::TaskErrorManager |
( |
| ) |
|
|
inline |
19841 }
atomic< bool > has_error
Lock-free error flag.
Definition duckdb.hpp:19882
◆ PushError()
19843 {
19844 lock_guard<mutex> elock(error_lock);
19845 this->
exceptions.push_back(std::move(error));
19847 }
vector< ErrorData > exceptions
Exceptions that occurred during the execution of the current query.
Definition duckdb.hpp:19880
◆ GetError()
| ErrorData duckdb::TaskErrorManager::GetError |
( |
| ) |
|
|
inline |
19849 {
19850 lock_guard<mutex> elock(error_lock);
19852
19853
19854
19855
19857 return entry;
19858 }
◆ HasError()
| bool duckdb::TaskErrorManager::HasError |
( |
| ) |
|
|
inline |
◆ ThrowException()
| void duckdb::TaskErrorManager::ThrowException |
( |
| ) |
|
|
inline |
19864 {
19865 lock_guard<mutex> elock(error_lock);
19868 entry.Throw();
19869 }
◆ Reset()
| void duckdb::TaskErrorManager::Reset |
( |
| ) |
|
|
inline |
19871 {
19872 lock_guard<mutex> elock(error_lock);
19875 }
The documentation for this class was generated from the following file: