Defines and implements namespaces and functions for algorithms that pertain to differential drive (tank drive) robots.
More...
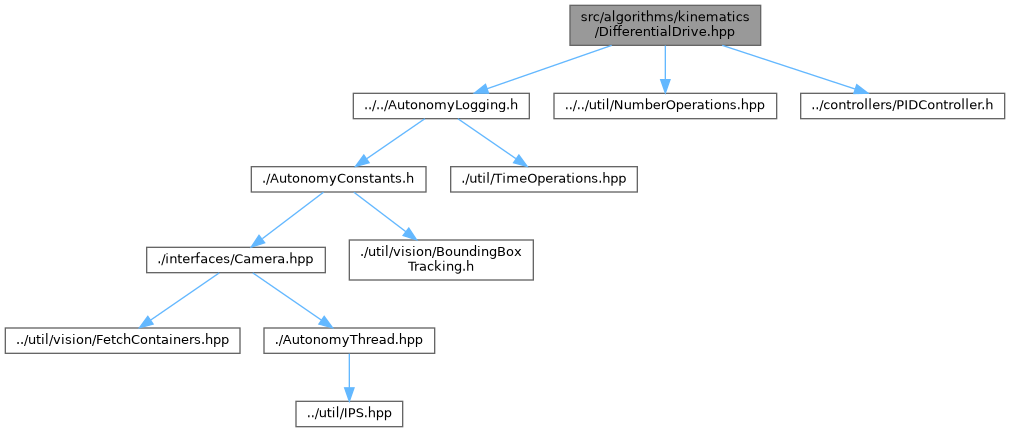
Go to the source code of this file.
|
| struct | diffdrive::DrivePowers |
| | This struct is used to store the left and right drive powers for the robot. Storing these values in a struct allows for easy handling and access to said variables. More...
|
| |
|
| namespace | diffdrive |
| | Namespace containing algorithms related to calculating drive powers, odometry, trajectories, kinematics, etc of differential drive (tank drive) robots.
|
| |
|
| enum class | DifferentialControlMethod { eArcadeDrive
, eCurvatureDrive
} |
| |
|
| DrivePowers | diffdrive::CalculateTankDrive (double dLeftSpeed, double dRightSpeed, bool bSquareInputs=false) |
| | Tank drive inverse kinematics for differential drive robots.
|
| |
| DrivePowers | diffdrive::CalculateArcadeDrive (double dSpeed, double dRotation, const bool bSquareInputs=false) |
| | Arcade drive inverse kinematics for differential drive robots.
|
| |
| DrivePowers | diffdrive::CalculateCurvatureDrive (double dSpeed, double dRotation, const bool bAllowTurnInPlace, const bool bSquareInputs=false) |
| | Curvature drive inverse kinematics for differential drive robots. The rotation parameter controls the curvature of the robot's path rather than it's rate of heading change. This makes the robot more controllable at high speeds.
|
| |
Defines and implements namespaces and functions for algorithms that pertain to differential drive (tank drive) robots.
- Author
- clayjay3 (clayt.nosp@m.onra.nosp@m.ycowe.nosp@m.n@gm.nosp@m.ail.c.nosp@m.om)
- Date
- 2023-09-21
- Copyright
- Copyright Mars Rover Design Team 2023 - All Rights Reserved