Public Member Functions |
Protected Member Functions |
Protected Attributes |
Friends |
List of all members
ARoverVehiclePawn Class Reference
Custom WheeledVehiclePawn subclass which integrates many required pieces of logic for the rover's function. More...
#include <RoverVehiclePawn.h>
Inheritance diagram for ARoverVehiclePawn:
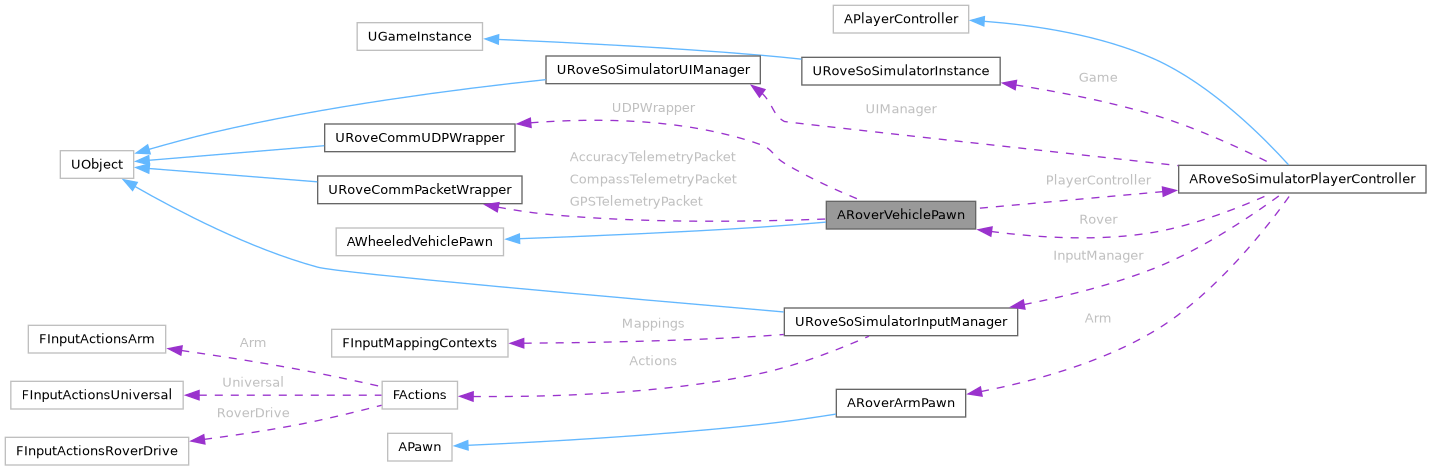
Collaboration diagram for ARoverVehiclePawn:
Protected Attributes | |
| uint8 | ControlState |
| uint8 | CameraState |
| uint8 | AttachmentState |
| float | TranslationThrottle |
| float | RotationDelta |
| float | LeftThrottle |
| float | RightThrottle |
| FVector | SavedSpawnPoint |
| FRotator | SavedSpawnRotation |
| bool | DoSplineDrawing |
| FVector | LastSplineLocation |
| bool | PointcloudVisible |
| ARoveSoSimulatorPlayerController * | PlayerController |
| UChaosWheeledVehicleMovementComponent * | VehicleMovement |
| TUniquePtr< IRoverInterface > | RoverInterface |
| URoveCommUDPWrapper * | UDPWrapper |
| AGeoReferencingSystem * | GeoRefSystem |
| FTimerHandle | RoveCommTimerHandle |
| URoveCommPacketWrapper * | GPSTelemetryPacket |
| URoveCommPacketWrapper * | AccuracyTelemetryPacket |
| FTimerHandle | CompassTimerHandle |
| URoveCommPacketWrapper * | CompassTelemetryPacket |
| USpringArmComponent * | CameraSpringArm |
| UCameraComponent * | Camera |
| UStaticMeshComponent * | BackPanel |
| UMaterialInstanceDynamic * | BackPanelMaterial |
| USplineComponent * | Spline |
| TArray< USplineMeshComponent * > | SplineMeshes |
| TWeakObjectPtr< UStaticMeshComponent > | AutoHead |
| TWeakObjectPtr< UChildActorComponent > | Arm |
| USpringArmComponent * | ZEDSpringArm |
| TSubclassOf< AActor > | ZED2iStereoCamera |
| UChildActorComponent * | FrontZEDCamera |
| UChildActorComponent * | RearZEDCamera |
| ERoverInterfaceSubclasses | RoverInterfaceSubclass |
| bool | HasRearZED |
| float | SplineTrailDistance |
| UStaticMesh * | SplineTrailMesh |
| UMaterial * | SplineTrailMaterial |
| FVector | RoverResetLocation |
| float | MotorMaxTorque |
| float | MotorPower |
| float | FinalGearRatio |
| float | FinalMechanicalEfficiency |
| TArray< int32 > | LeftWheelIndices |
| TArray< int32 > | RightWheelIndices |
Friends | |
| class | ITalos2025Interface |
Detailed Description
Custom WheeledVehiclePawn subclass which integrates many required pieces of logic for the rover's function.
The documentation for this class was generated from the following files:
- Source/RoveSoSimulator/Public/Core/RoverVehiclePawn.h
- Source/RoveSoSimulator/Private/Core/RoverVehiclePawn.cpp
- Source/RoveSoSimulator/Private/Core/RoverVehiclePawnCallbacks.cpp
Generated by